PyTorch-YOLOv3のdetect.pyを改造してみた[TensorBoard/tensorboardX]



はじめに
前回の記事でPyTorch-YOLOv3を動かすことができたので、入力した画像の中にある物体を判別するdetect.pyを改造してみます。
すでに実行結果の画像は保存されるようになっていたので、ラベルの数をカウントしたものをコマンドプロンプトで表示し、またTensorBoardで実行結果の画像表示することによってローカルから簡単に結果を見ることができるようにしました。
コード
実際に改造した結果のコードを紹介します。
from __future__ import division
from models import *
from utils.utils import *
from utils.datasets import *
import os
import sys
import time
import datetime
import argparse
from PIL import Image
import torch
from torch.utils.data import DataLoader
from torchvision import datasets
from torch.autograd import Variable
import matplotlib.pyplot as plt
import matplotlib.patches as patches
from matplotlib.ticker import NullLocator
import cv2
import numpy
import tensorboardX
from collections import Counter
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--image_folder", type=str, default="data/samples", help="path to dataset")
parser.add_argument("--model_def", type=str, default="config/yolov3.cfg", help="path to model definition file")
parser.add_argument("--weights_path", type=str, default="weights/yolov3.weights", help="path to weights file")
parser.add_argument("--class_path", type=str, default="data/coco.names", help="path to class label file")
parser.add_argument("--conf_thres", type=float, default=0.8, help="object confidence threshold")
parser.add_argument("--nms_thres", type=float, default=0.4, help="iou thresshold for non-maximum suppression")
parser.add_argument("--batch_size", type=int, default=1, help="size of the batches")
parser.add_argument("--n_cpu", type=int, default=0, help="number of cpu threads to use during batch generation")
parser.add_argument("--img_size", type=int, default=416, help="size of each image dimension")
parser.add_argument("--checkpoint_model", type=str, help="path to checkpoint model")
opt = parser.parse_args()
print(opt)
writer = tensorboardX.SummaryWriter()
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
os.makedirs("output", exist_ok=True)
# Set up model
model = Darknet(opt.model_def, img_size=opt.img_size).to(device)
if opt.weights_path.endswith(".weights"):
# Load darknet weights
model.load_darknet_weights(opt.weights_path)
else:
# Load checkpoint weights
model.load_state_dict(torch.load(opt.weights_path))
model.eval() # Set in evaluation mode
dataloader = DataLoader(
ImageFolder(opt.image_folder, img_size=opt.img_size),
batch_size=opt.batch_size,
shuffle=False,
num_workers=opt.n_cpu,
)
classes = load_classes(opt.class_path) # Extracts class labels from file
Tensor = torch.cuda.FloatTensor if torch.cuda.is_available() else torch.FloatTensor
imgs = [] # Stores image paths
img_detections = [] # Stores detections for each image index
print("\nPerforming object detection:")
prev_time = time.time()
for batch_i, (img_paths, input_imgs) in enumerate(dataloader):
# Configure input
input_imgs = Variable(input_imgs.type(Tensor))
# Get detections
with torch.no_grad():
detections = model(input_imgs)
detections = non_max_suppression(detections, opt.conf_thres, opt.nms_thres)
# Log progress
current_time = time.time()
inference_time = datetime.timedelta(seconds=current_time - prev_time)
prev_time = current_time
print("\t+ Batch %d, Inference Time: %s" % (batch_i, inference_time))
# Save image and detections
imgs.extend(img_paths)
img_detections.extend(detections)
# Bounding-box colors
cmap = plt.get_cmap("tab20b")
colors = [cmap(i) for i in np.linspace(0, 1, 20)]
print("\nSaving images:")
# Iterate through images and save plot of detections
for img_i, (path, detections) in enumerate(zip(imgs, img_detections)):
print("(%d) Image: '%s'" % (img_i, path))
# Create plot
img = np.array(Image.open(path))
plt.figure()
fig, ax = plt.subplots(1)
ax.imshow(img)
# Draw bounding boxes and labels of detections
if detections is not None:
# Rescale boxes to original image
detections = rescale_boxes(detections, opt.img_size, img.shape[:2])
unique_labels = detections[:, -1].cpu().unique()
n_cls_preds = len(unique_labels)
bbox_colors = random.sample(colors, n_cls_preds)
cls_count_list = []
for x1, y1, x2, y2, conf, cls_conf, cls_pred in detections:
cls_count_list.append(classes[int(cls_pred)])
print("\t+ Label: %s, Conf: %.5f" % (classes[int(cls_pred)], cls_conf.item()))
box_w = x2 - x1
box_h = y2 - y1
color = bbox_colors[int(np.where(unique_labels == int(cls_pred))[0])]
# Create a Rectangle patch
bbox = patches.Rectangle((x1, y1), box_w, box_h, linewidth=2, edgecolor=color, facecolor="none")
# Add the bbox to the plot
ax.add_patch(bbox)
# Add label
plt.text(
x1,
y1,
s=classes[int(cls_pred)],
color="white",
verticalalignment="top",
bbox={"color": color, "pad": 0},
)
cls_count = Counter(cls_count_list)
print("Count label *************")
for c, num in cls_count.most_common():
print(c, ":", num)
# Save generated image with detections
plt.axis("off")
plt.gca().xaxis.set_major_locator(NullLocator())
plt.gca().yaxis.set_major_locator(NullLocator())
filename = path.split("/")[-1].split(".")[0]
plt.savefig(f"output/{filename}.png", bbox_inches="tight", pad_inches=0.0)
img_array = cv2.imread(f"output/{filename}.png")
img_array = cv2.cvtColor(img_array, cv2.COLOR_BGR2RGB)
writer.add_image(f"output/{filename}.png", img_array, 0, dataformats='HWC')
plt.close()
writer.close()実行結果
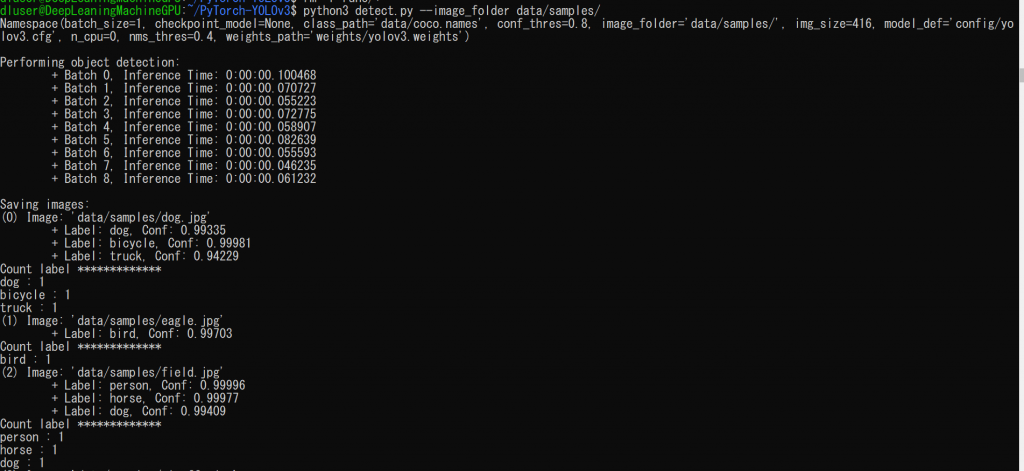
以下のコマンドで実行します。
python3 detect.py --image_folder data/samples/コマンドプロンプトには以下のようにラベルのカウント結果が表示されます。
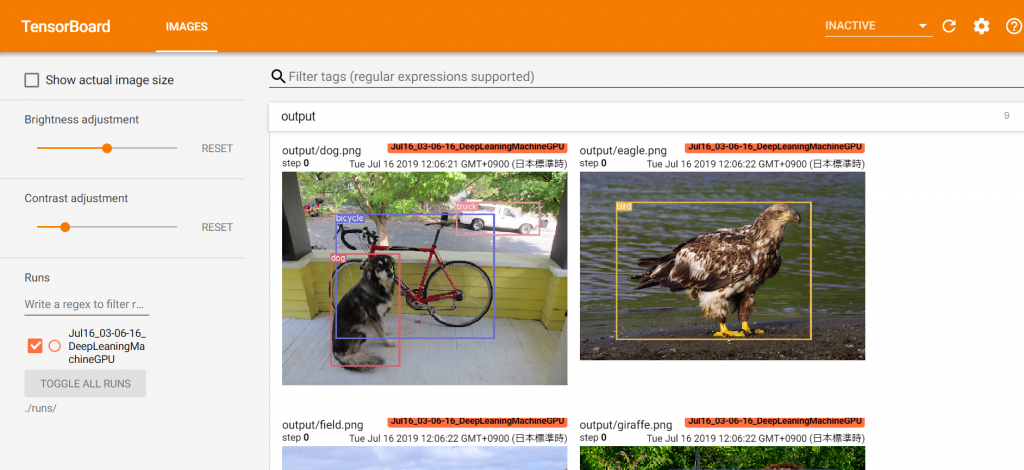
TensorBoardの結果は./runsに保存されるので、この記事を参考にローカルのブラウザからTensorBoardにアクセスすると、以下のように表示されます。
おわりに
PyTorch-YOLOv3の入力した画像の中にある物体を判別するdetect.pyを改造してみました。
TensorBoard便利ですね。







![Microsoft Power BI [実践] 入門 ―― BI初心者でもすぐできる! リアルタイム分析・可視化の手引きとリファレンス](/assets/img/banner-power-bi.c9bd875.png)
![Microsoft Power Apps ローコード開発[実践]入門――ノンプログラマーにやさしいアプリ開発の手引きとリファレンス](/assets/img/banner-powerplatform-2.213ebee.png)
![Microsoft PowerPlatformローコード開発[活用]入門 ――現場で使える業務アプリのレシピ集](/assets/img/banner-powerplatform-1.a01c0c2.png)