2020-02-25
2020-02-25

はじめに
オリンピックに向けて、様々な自動運転車の開発・実証実験が行われています。
そんな取り組みの1つとして、2015年8月に世界初のオープンソースの自動運転プラットフォームとして公開されたAutowareがあります。
このAutowareを用いた自動運転車両の1つとして、株式会社マクニカさんのMACNICARが挙げられます。
こちらのにMACNICARに試乗させていただく機会があったので、この記事ではそのレポートをさせていただきます。
始めに自動運転プラットフォームAutowareや今回乗せていただいたMACNICARの概要を紹介してから、試乗のレポートをします。
自動運転ソフトウェアAutowareとは
Autowareとは一般道での完全自動運転の実現に向けたプラットフォームで、自己位置推定、環境認識、経路経過、経路追従など自動運転で最低限必要な機能を提供しています。
そのソースコードはこちらで公開されており、世界中の大学や企業が日々アップデートしています。
自動運転車両MACNICAR
そのAutowareを利用した自動運転車両がMACNICARです。
今回はこちらのレクサスの説明を受けて、試乗させていただきました。
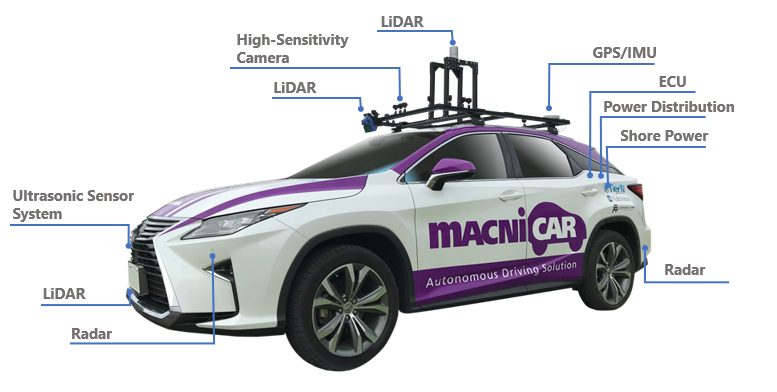
センサーはカメラ12個、LiDAR2個、レーダー6個などが車両に積まれていて、これらから取得したデータをNVIDIA Drive AGX Xavier上のAutowareで演算処理しているそうです。
そもそも自動運転車両の中では、どういう機能が動いているの…?
マクニカの方の説明によると以下です。
事前準備
- マップ作成:走行する経路内の以下の2種類のマップを事前に作成する
- Point Cloud Data map(PCD map):点群データ
- Vector map:PCD mapに車線や信号の位置といった情報を対応付けたもの
- センサーキャリブレーション:カメラとLiDARの位置を調整
- Autowareの実行
以上から今回の自動運転車は走行経路の情報が事前に必要ということがわかりました。
自動運転中に動いている機能
- 自己位置推定:車両の位置・向きの推定
- 信号位置・一時停止位置の判定
- カメラを用いた信号認識
- LiDARを用いた障害物の検出
- 経路計画:スタート地点からゴール地点までの大まかな経路(waypoint)を計画。
- 経路追従:経路計画で作成された予定走行経路(Global waypoint)を基本的に走行していくが、信号や一時停止の検出・障害物回避の場合はそれ用の新経路(Local waypoint)を走行する。
以上から実際の自動運転では「ただ経路に沿って車を動かす」というだけでも、「周囲の環境認識」や「検知した環境を考慮した経路の計算」といった様々な機能が複合的に動いているということが分かりました。
試乗
こちらのMACNICARに試乗させていただきました。

体験させていただいたのは教習所を1周するコースで、信号検知・障害物回避・一時停止が含まれていました。
実際の乗り心地は障害物のない直線経路では30km近くスピードを出すにも関わらず、スムーズな発進・停止でした。
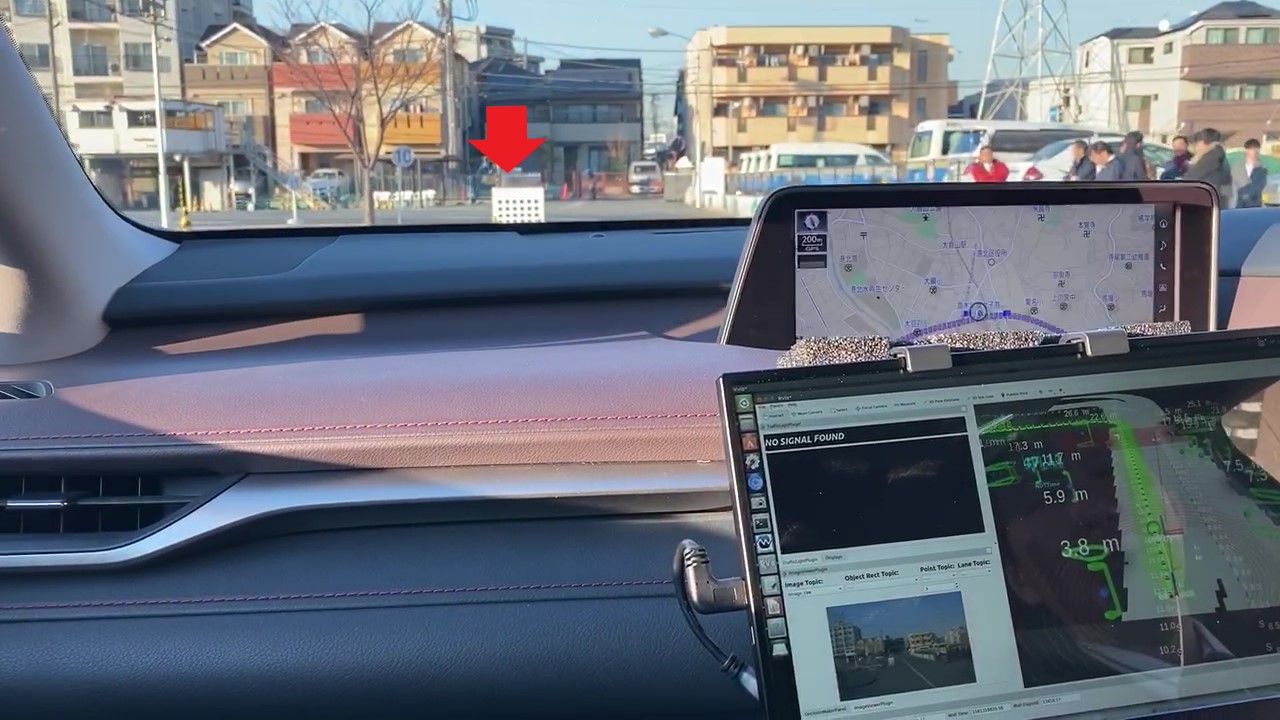
車内の様子は以下のような感じで、ナビとは別にAutowareの実行結果を見ることができるディスプレイが設置されていました。
表示されている内容としては以下です。
- 画面左上:信号検知結果
- 画面左下:ライブカメラ映像
- 画面右:Autowareの経路計画の結果とLiDARで検知している物体が地図上にマッピング

以下では信号検知・障害物回避・一時停止の様子についてそれぞれ紹介していきます。
信号検知
まずは信号検知のデモの様子を紹介します。
信号の色を検知するのはカメラでやっているそうです。
そのため、日の差し具合によってパラメータを手動で変えることで色の認識精度を上げていて、西日が強いときが割と誤検知しやすいそうです。
ちなみに試乗させていただいたのは西日の強い夕方だったのですが、赤信号を検知してきちんと止まってくれました。

再発進も信号が青になったら自動で行われるのですが、西日が強く検知できなかったため、今回は手動で発進していました。
障害物回避
次に障害物回避のデモも実践していただきました。 外から見ると、以下のように障害物回避を回避している様子が見られます。

次の写真の赤矢印部分の下にある白い四角が車の中から見た障害物です。 画面右で赤い四角が表示され、計画している経路に障害物を検知している様子が見られます。
そして、障害物に近づいていくと、画面右の緑色の線が障害物を迂回するような経路に変化しました。 こちらの障害物を検知した時にどういった角度でよけるのかもパラメータで調節しているそうです。

一時停止
最後に一時停止のデモもしていただきました。 以下の写真の赤矢印のところに一時停止があるのですが、ちゃんとカメラで検知して緑色の線上に青い四角が表示されています。

実際に一時停止したときの写真が以下です。
検知した一時停止の青い線の手前で停止しています。
人間が運転している車両では左右を見て安全確認をしますが、まだこちらの自動運転では左右の安全確認は実装しておらず停止のみとなっているそうです。

おわりに
Autowareを用いた自動運転車両の株式会社マクニカさんのMACNICARに試乗させていただいたときのレポートをさせていただきました。
実際に乗ってみると、想像以上にスムーズに動き、信号検知・一時停止・障害物回避などを自然に行っていて驚きました。
その一方で、信号を認識するためのパラメータ調節や一時停止の安全確認など、これから自動化しそうなところが見えたのはとてもおもしろかったです。
今後ますます発展していく自動運転車から目が離せませんね。






![Microsoft Power BI [実践] 入門 ―― BI初心者でもすぐできる! リアルタイム分析・可視化の手引きとリファレンス](/assets/img/banner-power-bi.c9bd875.png)
![Microsoft Power Apps ローコード開発[実践]入門――ノンプログラマーにやさしいアプリ開発の手引きとリファレンス](/assets/img/banner-powerplatform-2.213ebee.png)
![Microsoft PowerPlatformローコード開発[活用]入門 ――現場で使える業務アプリのレシピ集](/assets/img/banner-powerplatform-1.a01c0c2.png)